Robot Hand
A robot hand is a device structured like a human hand that is attached to the end of a robotic arm. It is also called a "hand effector" or "end effector.”
Industrial robot hands are important in automated factories, where they are used to carry items or change the orientation of objects for easier assembly or processing. They are generally classified by type: "suction hands" or "grasping hands.”
Suction hands carry objects by adsorbing them with air or magnetic force. They are suitable for carrying lightweight objects, but if the suction cup becomes wet, dusty, or dirty, the suction strength weakens, and the object may be dropped.
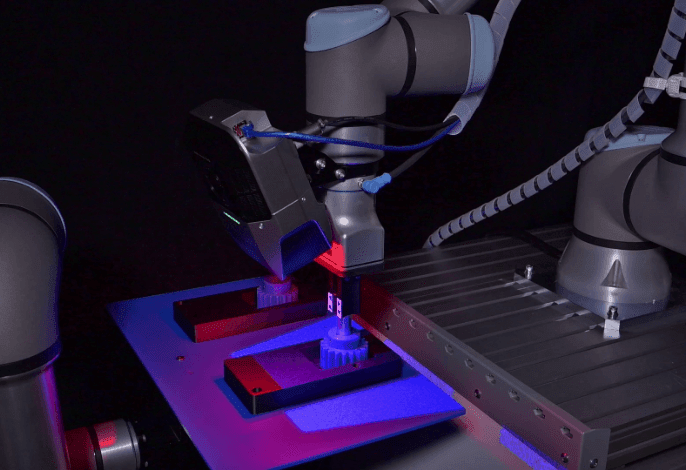
Grasping hands have robotic fingers, which are finger-like mechanisms that clamp and move an object. Although they can carry objects that are heavy or have complex forms, the force exerted on the object may cause damage to the material or the product being grasped.
Consequently, the most suitable type of mechanical hand or robot hand depends on the form and material of the object to be transported.
Synonym
Mechanical Hand / Robotic Hand
Related terms
Robotic Fingers / Factory Automation
Related solutions

Application examples