ピックアンドプレース
ぴっくあんどぷれーす
ピックアンドプレース(Pick and Place、ピックアンドプレイスとも表記)とは、製造工程や組立工程において、ワーク(部品や製品)を正確につかみ上げ(Pick)、別の位置に移動して配置(Place)する一連の作業を指します。この動作は製造現場における代表的な搬送工程の一つであり、コンベアから作業台への移動、部品実装、包装、仕分けなど、様々な生産ラインで活用されています。
従来は人の手作業や専用機で行われてきましたが、近年ではロボット技術や制御技術の高度化に伴い、産業用ロボットや協働ロボットによる自動化が進んでいます。
多品種少量生産への対応や人手不足といった課題を背景に、ピックアンドプレースの自動化は生産効率向上の有効な手段として注目されています。
ピックアンドプレースの基本動作
ピックアンドプレースの動作は、ワークの認識、ピッキング、移動、配置という4つのステップで構成されます。ビジョンシステムがワークの位置や姿勢を検出し、ロボットアームが最適な経路で移動してワークをつかみ、目的地に正確に配置します。
ピックアンドプレースが活用される場面
ピックアンドプレースは、製造業を中心に幅広い分野で活用されており、工程ごとの課題解決に貢献しています。
- 電子部品実装:
- プリント基板(PCB)上に表面実装部品(SMD)を配置する工程では、高速性と高い配置精度が求められます。用途によっては、1秒間に複数個の部品を処理する能力や、数十ミクロン単位の精度が必要とされる場合もあります。
- 部品搬送と組立工程:
- 機械部品の組立ラインでは、協働ロボットや直交ロボットが部品をピッキングし、治具や組立位置に正確に配置する作業に活用され、自動車部品、家電製品、産業機器など多様な製品の組立工程で省人化や作業品質の安定化に寄与しています。
- 検査工程での活用:
- ワークをカメラや測定装置の前に正確に搬送し、検査後に良品・不良品を仕分ける工程でもピックアンドプレースが使われ、人の目視検査では見落としやすい微細な欠陥も安定して検出できます。
- 食品・医薬品の包装工程:
- 食品や医薬品、化粧品などの小型製品をコンベアから取り出し、トレイや箱に整列させる包装工程で活躍し、衛生管理が厳しい現場では人の手を介さない自動化が特に重視されます。
- 物流・倉庫での仕分け:
- 倉庫内で様々な形状やサイズの商品をピッキングし、梱包用の箱や別のコンベアへ移動させる作業にも応用され、ECサイトの物流センターなどで出荷効率の向上に貢献しています。
ピックアンドプレースの自動化を支える構成要素
ピックアンドプレースシステムは、複数の機器や技術が統合されることで高度な自動化を実現しています。
エンドエフェクタ(把持機構)
ワークを実際につかむ部分で、対象物の形状・材質・重量に応じて最適な方式を選択します。
- 吸着パッド:
- 真空圧を利用してワークを吸着する方式で、薄板や平面を持つワークに適しています。電子基板、樹脂成形品、食品パッケージなどで広く使用されます。
- メカチャック:
- 指のように動く機構でワークを挟み込んで保持する方式です。円筒形や不定形のワーク、複雑な形状の部品に対応できます。
- 専用治具:
- 特殊な形状のワークに対しては、専用設計のエンドエフェクタを製作することで確実な把持が可能になります。
ロボット・アクチュエータ
パラレルリンクロボット、スカラロボット、垂直多関節ロボット、協働ロボットなどが用途に応じて使い分けられます。動作が単純な工程では、シリンダ方式が採用される場合もあります。
ビジョンシステム
カメラとセンサーを用いてワークの位置や姿勢を検出し、ロボットの動作を補正します。2Dカメラによる平面認識から、3Dカメラによる立体的な位置検出まで、用途に応じたシステムが選択されます。
制御システム
PLC(プログラマブルロジックコントローラ)やロボットコントローラが、センサー信号やビジョンデータをもとに最適な動作を実現します。生産タクトタイムに合わせた動作速度調整や、複数ロボットの協調制御も可能です。
ピックアンドプレース自動化における課題
製造現場でピックアンドプレースを自動化する際には、いくつかの技術的課題が存在します。
- ワーク姿勢のばらつき:
- コンベアやパレット上のワークは必ずしも整列しておらず、位置や角度にばらつきが生じます。従来の固定カメラ方式では、重なったワークや箱の端に位置するワークを認識できない死角が課題となっていました。
- 多品種少量生産への対応:
- 品種変更のたびに専用治具の交換やロボットの再教示が必要となる場合があり、段取り作業に時間を要することが生産効率低下の要因となります。
- サイクルタイムの短縮:
- 生産効率を向上させるためには、ピックからプレースまでの一連の動作時間を短縮する必要があります。特に、ばら積み状態のワークでは認識処理に時間がかかりやすく、生産タクトに影響を及ぼすことがあります。
- 動いているワークへの対応:
- コンベア上を流れるワークに対する作業では、従来、搬送を一時的に停止させる、またはエンコーダーなどの同期装置や複雑な配線を追加する必要がありました。さらに、コンベアの速度変動や位置ずれが生じると認識精度が低下し、場合によってはライン停止につながることも課題とされてきました。
ピックアンドプレース自動化の解決事例
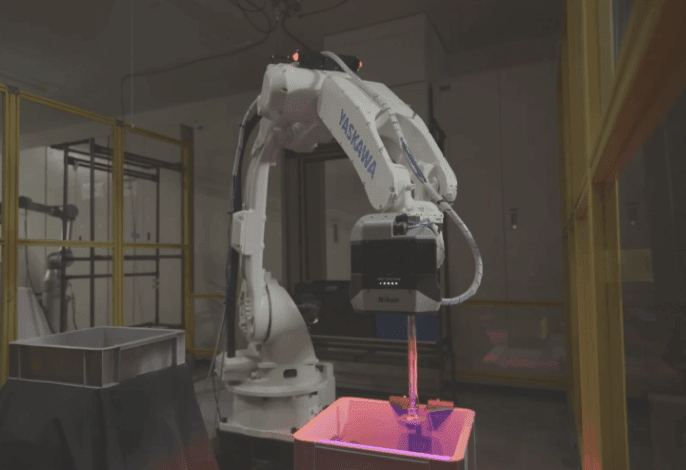
実際の製造現場では、ピックアンドプレースの自動化により、生産性向上や作業の安定化が図られています。ここでは、前述した課題に対する具体的な解決アプローチの一例として、ニコンのロボットビジョンシステムにおける技術的な取り組みをご紹介します。
課題に対するニコンの解決アプローチ
| 課題 | ニコンのロボットビジョンシステムによる技術的解決策 |
|---|---|
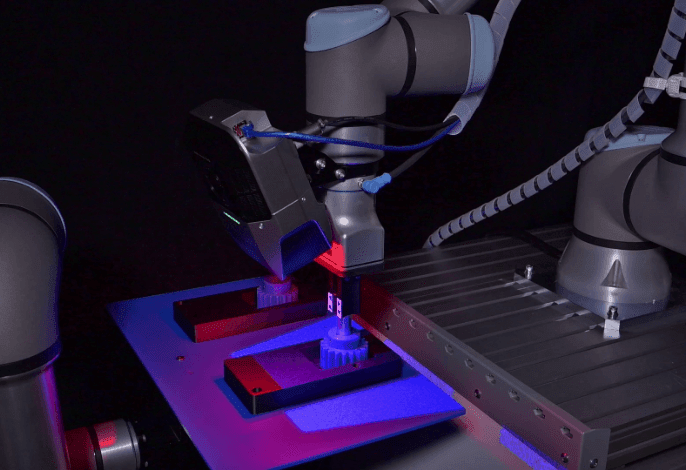
| ワーク姿勢のばらつき | ロボット先端に取り付けたハンドアイビジョンにより、複数角度からワークを認識。3Dカメラと高解像度プロジェクターを用いて深度情報を含む点群データを生成し、複雑に重なった状態にあるワークでも個々の位置と姿勢を正確に検出することが可能です。これにより、従来課題となっていた死角の低減や取り残しの抑制に寄与します。 |
| 多品種少量生産への対応 | 視覚的に操作可能なGUIと自動キャリブレーション機能により、比較的短時間でワーク登録を行うことができます。さらに、クラウド(IoTプラットフォーム)を介してワークデータを一元管理・配信することで、品種切り替え時の段取り作業の効率化を支援します。 |
| サイクルタイムの短縮 | 高速センシング技術により、ワーク認識から動作開始までを短時間で行うことが可能です。独自のアルゴリズムを活用することで、認識精度と処理速度の両立を図っています。 |
| 動いているワークへの対応 | 高速画像処理技術により、コンベアと同期装置を用いずに、移動中のワークを認識・追従することが可能です。ハンドビジョン方式によりリアルタイムで位置補正を行い、コンベアを停止させることなく連続した作業を支援します。 |
詳しい製品情報は、ニコンロボットビジョンシステム製品ページをご参照ください。
よくある質問
Q1: ピックアンドプレースとピックアンドプレイスは違うものですか?
ピックアンドプレース(Pick and Place)とピックアンドプレイス(Pick and Place)は、同じ意味の用語です。英語の"Place"のカタカナ表記の違いで、製造現場では「ピックアンドプレース」と表記されることが多いですが、どちらの表記も一般的に使用されています。
Q2: ピックアンドプレースロボットの導入コストはどのくらいですか?
導入コストは、使用するロボットの種類や工程の複雑さによって大きく異なります。単純な往復動作であればエアシリンダやエレシリンダを用いたシステムで数十万円から、協働ロボットを使用した柔軟性の高いシステムでは数百万円から、パラレルリンクロボットなどの高速システムでは1000万円以上になることもあります。動作が単純で位置が固定される工程では、ロボットよりもシリンダ方式の方が初期費用を抑えられるケースが多くあります。
Q3: ピックアンドプレースに適したロボットの種類は何ですか?
用途によって最適なロボットは異なります。高速性が求められる電子部品実装や食品整列にはパラレルリンクロボット、組立や搬送にはスカラロボット、複雑な姿勢制御が必要な場合は垂直多関節ロボット、人と協働する現場では協働ロボットが適しています。また、単純な往復動作で固定ピッチの工程であれば、エアシリンダやエレシリンダ、ロボシリンダを使った方式の方がコストパフォーマンスに優れる場合もあります。
Q4: ピックアンドプレースの自動化は人手作業に比べてどのようなメリットがありますか?
自動化による主なメリットは、作業の高速化、精度の向上、省人化の3点です。さらに、24時間稼働が可能なため、生産能力の向上にも貢献します。
参考文献
本記事の作成にあたり、以下の情報源を参考にいたしました。
原田研介, Foissotte Torea, 辻徳生, 永田和之, 山野辺夏樹, 中村晃, 河井良浩. 「双腕を有するロボットによるピックアンドプレースの動作計画」日本機械学会論文集C編, 78巻792号, 2012年, pp.2870-2883.
関連ソリューション

アプリケーション事例