ロボットアーム
ろぼっとあーむ
ロボットアームとは、人間の腕のような動作を再現するためにジョイント(関節に相当する可動部)とリンク(骨に相当する剛体部品)で構成された産業用の機構装置です。マニピュレータとも呼ばれ、プログラムされた動作で搬送・組立・加工を自動的に行います。
基本構造は人間の骨格に似ており、ジョイントを動かしてリンクで力を伝えるという原理は人間と共通です。一般に、ジョイント数(軸数)が増えるほど動作の自由度は高くなり、可動範囲も広がる傾向があります。
産業用途では6軸構成が主流で、自動車・電子機器・食品・医薬品など幅広い分野で活用されています。
ロボットアームの仕組み
ロボットアームの構成要素
ロボットアームは以下の3要素で構成されています。
- 機械的構造:
- リンクとジョイントの組み合わせで、人間の上腕・前腕・手首に相当する部分を形成します。
- 駆動系:
- サーボモーター(位置や速度の精密制御が可能な高機能モーター)が各軸を正確に駆動します。駆動エネルギーは電気が最も一般的で、大きな力が必要な場合は油圧も利用されます。
- 制御系:
- コントローラーとソフトウェアで構成され、ティーチング(教示)によってプログラムされた動作を再現します。
6軸の垂直多関節ロボットでは、各軸が以下の役割を担っています。
- 第1軸(S軸):
- アーム全体を左右に回転
- 第2軸(L軸):
- アーム全体を前後に動作
- 第3軸(U軸):
- 腕を上下に動作
- 第4軸(R軸):
- 腕を回転
- 第5軸(B軸):
- 手首を上下に振る
- 第6軸(T軸):
- 手首を回転
第1〜3軸が指定場所に手首を運び、第4〜6軸が手首の向きを自在に変えるという役割分担になっています。この6軸構成が人間のような自在な動きを可能にしています。
ロボットアーム関節内部の主要構成要素
ロボットアームの関節内部は、主に以下のような要素で構成されています。
- アクチュエータ(サーボモーター):
- エネルギーを機械的な運動に変換する装置です。産業用ロボットでは位置・速度の精密制御が求められるため、サーボモーターが用いられます。
- 減速機:
- モーターの回転数を落とし、出力トルクを増大させる装置です。歯数の異なるギヤの組み合わせにより、回転数を10分の1に落とせばトルクは10倍になります。近年は波動歯車装置(ハーモニックドライブ等)を採用した高精度な減速機が主流です。
- エンコーダ:
- モーターの回転軸の位置(角度)を検出する装置です。これによりロボットがどの方向にどれだけ動いたかを正確に把握でき、精密な位置制御を実現します。
- 伝導機構:
- ベルトや歯車を用いて、モーターの力を離れた場所に伝達する要素です。伝導機構により手首部分のモーターを肘付近に配置できるため、手首をコンパクトに設計できます。
先端にはエンドエフェクタと呼ばれるハンドやツールを取り付けます。ハンドや吸着装置、溶接トーチ、塗装ガンなど、用途に応じて交換することで多様な作業に対応できる汎用性を実現しています。
ロボットアームの種類と選定のポイント
ロボットアームは構造の違いにより、主に以下の4タイプに分類されます。
| 種類 | 特徴 | 得意な作業 |
|---|---|---|
| 垂直多関節ロボット | 6軸構成が主流。リンクが直列に並ぶシリアルリンク機構で、最も汎用性が高い | 溶接・塗装・組立・搬送など幅広い用途 |
| スカラ(水平多関節)ロボット | 水平方向に高速・高精度な動作が可能。上下方向の剛性が高い | 電子部品の組み立て・ピック&プレース |
| パラレルリンクロボット | 複数リンクの並列配置により高速動作に優れる。可搬重量は比較的小さい | 食品・医薬品の高速仕分け・包装 |
| 直交ロボット | スライド軸を直交させた構造。「ガントリーロボット」とも呼ばれ、比較的安価 | 搬送・組み立て・検査工程 |
※複雑な動作なら垂直多関節、速さならスカラやパラレルが選ばれる傾向にあります
また、ロボットアームの選定にあたって確認すべき主なポイントは以下の4つです。
- 可動範囲:
- ワークの搬送範囲をカバーできるか
- 可搬重量:
- ワークの重量に対応できるか
- 動作速度:
- 求められるサイクルタイムを満たせるか
- 位置決め精度:
- 作業に必要な繰り返し精度・絶対精度を確保できるか
ロボットアームが活用される場面
ロボットアームは製造業を中心に多様な場面で活用されています。主な適用分野は以下のとおりです。
- 自動車産業:
- 溶接・塗装・組立・検査など生産ラインのほぼ全工程に導入されています。近年はEV(電気自動車)のバッテリー搬送や新素材加工など、新たな用途も拡大しています。
- 電子機器・半導体:
- 精密な部品の実装・はんだ付け・検査工程でスカラロボットや直交ロボットが活用されています。クリーンルーム内での基板搬送にも対応しています。
- 食品・医薬品:
- 衛生管理が厳しい環境でのピッキング・仕分け・包装作業にパラレルリンクロボットなどが使われ、異物混入リスクの低減にも貢献しています。
- 物流・倉庫:
- ECの拡大に伴い、荷物の仕分け・パレタイジング(積み付け)にロボットアームが導入されるケースが増えています。
ロボットアームの導入における課題
ロボットアームは生産性向上や省人化に大きく貢献する一方、導入・運用にあたってはいくつかの課題が存在します。
位置精度の限界
産業用ロボットは「繰り返し位置決め精度(同じ動作を何度も再現する精度)」は±0.02mm程度と非常に高い水準にあります。一方で「絶対位置精度(指定した座標へ正確に到達する精度)」はそれほど高くありません。これはアームの剛性不足によるたわみや、稼働中の発熱による熱変形が主な原因で、高精度が求められる作業では外部センサー等による補正が必要になります。一般的にはキャリブレーション(較正)で精度を追い込みますが、時間経過や温度変化による再調整の負担が課題です。
ティーチング(教示)の負担
ロボットアームの動作を設定するティーチング作業は、ロボットメーカーごとに操作方法が異なるため、熟練した技術者に依存しがちです。多品種少量生産の現場では品種切り替えのたびにティーチングが必要となり、段取り替え時間が課題になります。
導入コスト
ロボットアーム本体に加え、ロボットハンド(エンドエフェクタ)、安全柵、コンベアなどの周辺設備、システムインテグレーション費用が必要です。協働ロボットで約100万~600万円(可搬重量やメーカーにより幅があります)、大型の垂直多関節ロボットでは数百万~数千万円規模になります。トータルの導入コストは本体価格の2~3倍になるケースも少なくありません。
変種変量生産への対応
従来のロボットアームは、あらかじめ決められた動作を正確に繰り返すことに最適化されています。そのため、ワークの形状や位置が頻繁に変わる変種変量生産では、柔軟な対応が難しいという課題がありました。
ロボットアームの課題を解決してきたニコンの事例
前述のような課題に対して、近年はさまざまな技術的アプローチが開発されています。
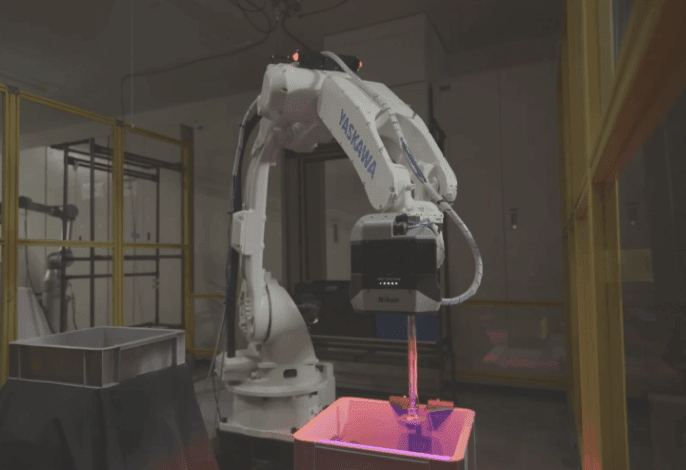
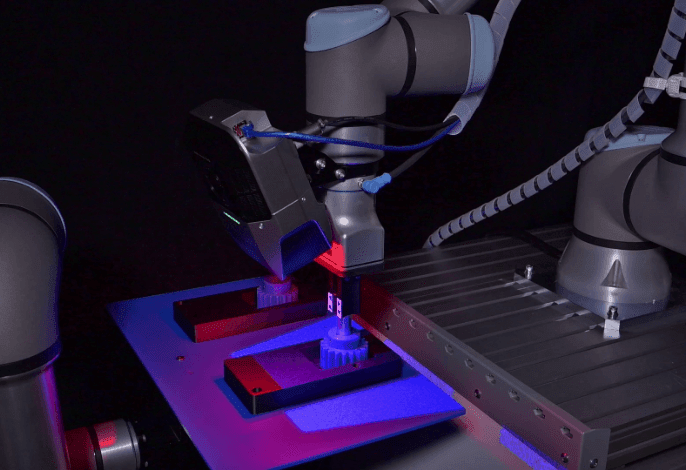
例えば、ニコンのロボットビジョンシステムは、ロボット手先に取り付ける「ハンドアイ型」のセンサーとコントローラーで構成されています。主な特徴は以下の3点です。
- 高速画像処理による高精度なビジョントラッキング:
- 高速画像処理により、コンベア上を移動するワークの位置ずれやブレを瞬時に補正します。搬送機器との同期作業が不要になり、既存の設備を活かしたまま導入できるため、セットアップの手間と設備コストを大幅に低減できます。
- 立体的な認識を実現したばら積みピッキング:
- 3Dカメラやプロジェクタを用いたばら積みピッキング技術では、不規則に積まれたワークの形状や位置を立体的に認識することができます。ハンドアイ型のため複数の角度から認識でき、固定カメラ方式と比べて死角を減らし、取りきり率の向上にも貢献します。
- 簡単セットアップ:
- CADモデルを用いた設定により、従来と比較して設定作業を効率化できるケースもあります
詳しい製品情報は、ニコンロボットビジョンシステム製品ページをご参照ください。
https://ngpd.nikon.com/vision-robotics/product/robot-vision-system/
ロボットアームの最新動向
産業用ロボット市場は拡大基調にあります。
- 世界市場規模:
- 2024年の約237億ドルから、2034年には約843.6億ドルに成長する見通しです。(年平均成長率約13.8%)
- 日本市場規模:
- 2025年の約12.8億ドルから、2034年には約28.6億ドル規模への拡大が見込まれています。
実際に、日本ロボット工業会の統計によると、2025年10〜12月の産業用ロボット受注額は前年同期比29.1%増の約2,713億円、出荷額は26.0%増の約2,286億円と、いずれも前年の同時期を大きく上回っています。2024年には中国市場の低迷や地政学的リスクの影響で受注・生産ともに前年割れとなりましたが、2025年に入り回復基調が鮮明になっており、市場予測どおりの成長軌道に乗りつつあるといえます。
技術面では、AI・機械学習の進化がロボットアームの能力を大きく向上させています。従来のロボットアームはあらかじめプログラムされた動作の繰り返しが主な役割でしたが、AIの活用により、環境の変化に応じた自律的な判断や、画像認識による柔軟なワーク対応が可能になりつつあります。
よくある質問
Q1. ロボットアームとは何ですか?
ロボットアームとは、人間の腕のような動作をする関節(ジョイント)とリンクで構成された産業用の機構装置です。プログラムされた動作によって搬送・組立・加工などの作業を自動的に行います。マニピュレータとも呼ばれ、自動車・電子機器・食品など幅広い分野で活用されています。
Q2. ロボットアームは何軸が主流ですか?
産業用ロボットでは6軸(6自由度)の垂直多関節ロボットが主流です。第1〜3軸が手首の位置決め、第4〜6軸が手首の姿勢制御を担い、三次元空間での自在な動作が可能です。用途によっては4軸のスカラロボットや3軸の直交ロボットが選ばれることもあります。
Q3. ロボットアームの精度を向上させるには?
ロボットアーム単体の絶対位置精度には構造上の限界があるため、外部センサーやビジョンシステムを併用してリアルタイムに補正する方法が一般的です。ローカライザー(位置測定装置)によるフィードバック補正を行えば、μmオーダーの高精度な位置決めを実現する技術も登場しています。
参考文献
Precedence Research. "Industrial Robots Market Size, Share, and Trends 2024 to 2034". Precedence Research.
https://www.precedenceresearch.com/industrial-robotics-market (参照 2026-03-17)
IMARC. "Japan industrial robotics market Size, Industry Report 2034". IMARC.
https://www.imarcgroup.com/japan-industrial-robotics-market (参照 2026-03-17)
矢野経済研究所. 「協働ロボット世界市場に関する調査を実施(2024年)」. 矢野経済研究所.
https://www.yano.co.jp/press-release/show/press_id/3591 (参照 2026-03-17)
日本ロボット工業会. 「マニピュレータ、ロボット統計 受注・生産・出荷実績(2025年4~6月期)」. 日本ロボット工業会.
https://www.jara.jp/data/press/2025/250725.html (参照 2026-03-17)
オートメーション新聞. 「日本の産業用ロボット市場の最新状況 2025年上半期の受注・生産・出荷額すべて前年超え」. オートメーション新聞.
https://www.automation-news.jp/2025/08/96448/ (参照 2026-03-17)
関連ソリューション

アプリケーション事例