ロボットハンド
ろぼっとはんど
Robot hand
Robot hand
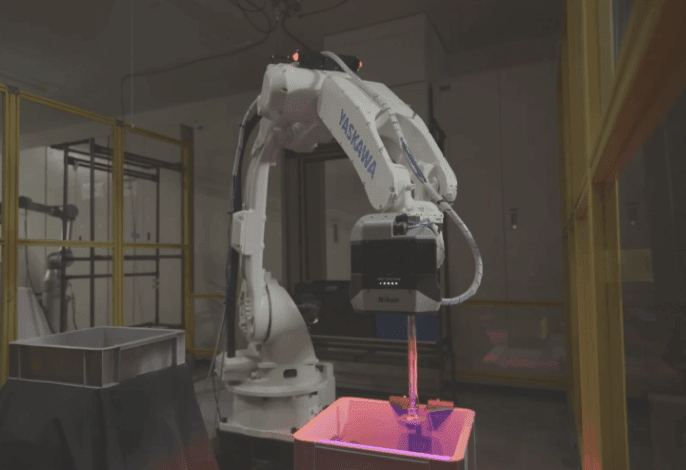
ロボットハンドとは、ロボットアームの先端部分に取り付けられる人間の手のような形をした部位のことです。「手先効果器」や「エンドエフェクタ」とも呼ばれます。
産業用のロボットハンドは、主に工場における商品の製造工程において、ものを運んだり、組み立てや加工がしやすいよう向きを変えたりすることに使われ、「吸着ハンド」と「把持ハンド」の2種類に分類することが可能です。
吸着ハンドは、空気や磁力でものを吸着させて運びます。軽量なものを運ぶのに向いていますが、吸着部が汚れると吸着力が弱まり、ものが落下してしまうリスクがあります。
把持ハンドは人の指のような機構があり、ものを挟み移動させます。複雑な形状のものや重量物を運ぶことができますが、ものに把持する力が加わるため移動させる材料や商品にダメージが及ぶ可能性があります。
このようにロボットハンドの最適な種類は、運びたいものの形状や素材によっても異なります。
関連ソリューション

アプリケーション事例