

製品ラインナップ
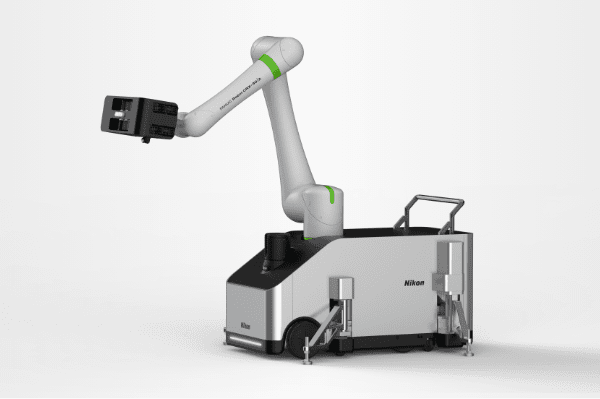
ロボットビジョンシステム


スペック
| 型番 | NSP-150-1 | NSP-250-1 | NSP-500-1 | |
|---|---|---|---|---|
| 解像度(pix) | 高解像度モード: 1408×1056/高速モード: 704×528 | |||
| 速度(fps) | 高解像度モード: Max 35/高速モード: 250(使用条件による) | |||
| 重量(kg) | 2.8 | |||
| 寸法(mm) | 192(W)×175.5(D)×81.5(H)(突起部を除く) | |||
| 電流/電圧 | 100V〜AC240V/50-60Hz、 3.3A | |||
| 保護構造 | IP5X(IP6X対応ご希望の場合はお問い合わせください) | |||
| 使用環境 | 温度(℃) | 0〜45 | ||
| 湿度 | 85% RH以下(但し、結露しないこと) | |||
| エンジン(制御PC) | ||||
| 型番 | NSP-E-1 | |||
| 寸法(mm) | 260×240×123 | |||
| 電源 | DC-In(ACアダプタ付属) | |||
| 外部モニタ接続 | VGA | |||
| 使用環境 | 温度(℃) | 0〜45(GPU除く/弊社アプリ環境において) | ||
| 湿度 | 5%〜95% RH(但し、結露しないこと) | |||
| その他 | ||||
| 対応ロボットメーカー | YASKAWA、FANUC、川崎重工業、Universal Robots、デンソーウェーブ (詳細はお問い合わせください) |
|||
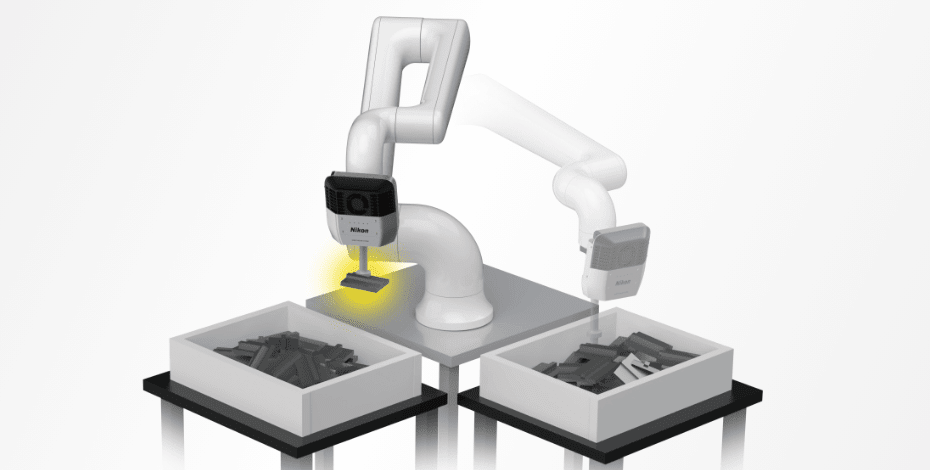
| アプリケーション別機能 | ばら積みピッキング | 2D/3D認識(部分CADマッチングも可)、自動手法追尾、把持位置補正、リトライ機能 | ||
| ビジョントラッキング | コンベア接続レス、高速位置補正機能、予測制御機能(補正終了時)、簡易エッジ編集 | |||
ラインナップ
よくあるご質問
ビジョンをロボットに取り付け後、付属のキャリブボードを使用しプログラムを実行していただくことでキャリブレーションが可能です
ビジョンとセットでの販売となっております
コントローラーに内蔵しております
ロボットに取り付けるハンドアイ型のみ対応しております
画像データを得るためのセンサ(カメラ)と処理を行うエンジン(制御PC)を提供しております
エンジンとご利用いただくロボットのコントローラーをEthernetケーブルにて接続し、ご利用いただけます
ばら積みピッキングとビジョントラッキングの2つのアプリケーションをご提供しております
CADモデル(stl.)が必要となります
搭載されているLED光源やシャッタースピードの関係上、影響は受けにくくなっております
コントローラーに内蔵しておりますソフトウエアで設定可能です。わかりやすくシンプルな設定画面によって直観的な操作を実現しております。
CADモデルは不要、追従対象を撮像し、ベースとなるモデルのエッジを登録します
コントローラーに内蔵しておりますソフトウエアで設定可能です。わかりやすくシンプルな設定画面によって直観的な操作を実現しております。
ロボットのメーカー・機種やワークによって異なります。詳細はお問い合わせください
可能、ワークの内容によってはご対応が難しい場合もございますのでお問い合わせよりご相談ください
状況に合わせて、遠隔または現地でのサポートにも対応いたします
クラウド機能をご導入いただいた際は充実したリモートサポートサービスをご用意しております
YASKAWA、FANUC、川崎重工業、Universal Robots、デンソーウェーブ 詳細はお問い合わせください
アプリケーション