不確実な現場の自動化を実現するニコンのロボットビジョン
ロボットビジョンシステム
2026.04

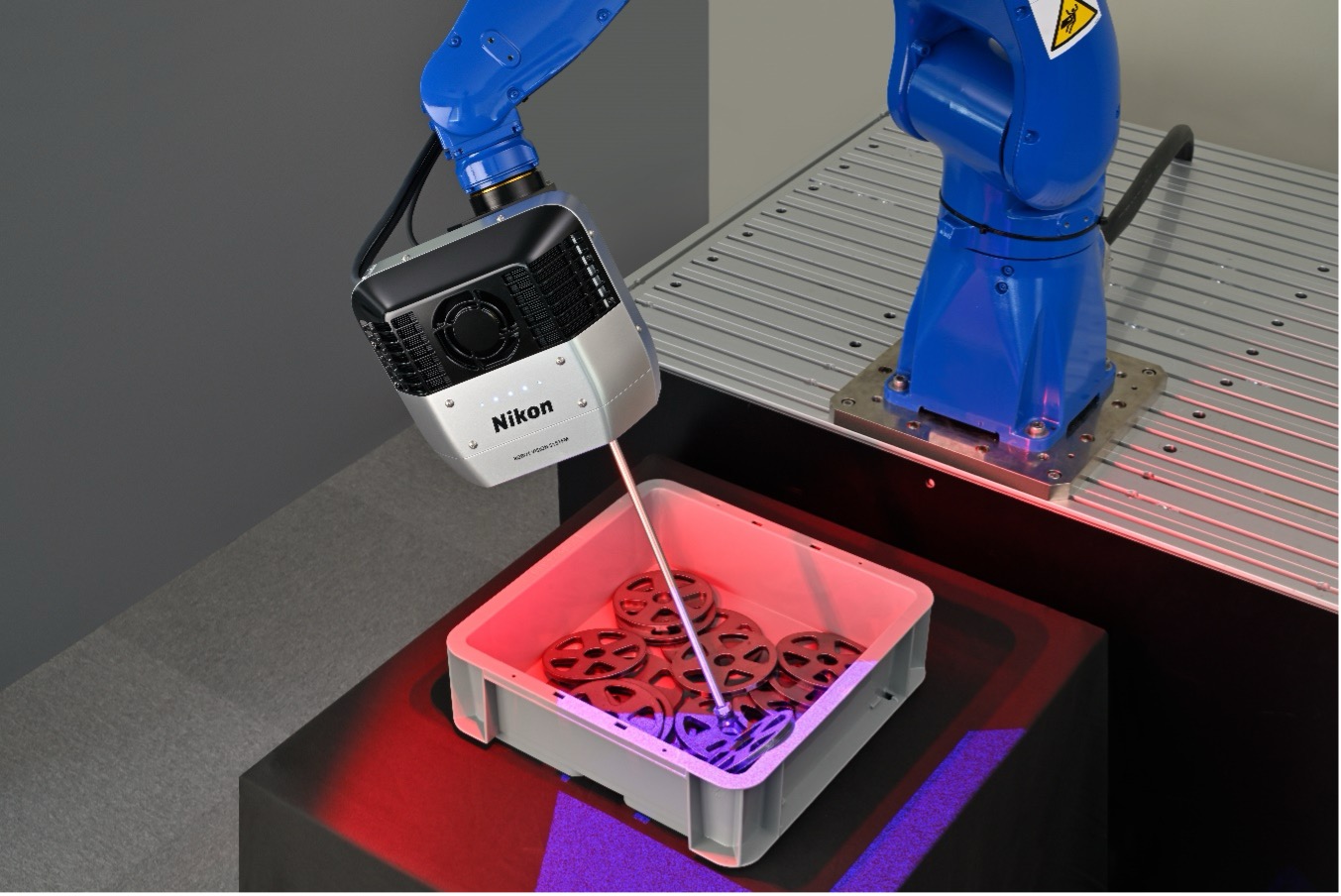
バラ積みされた部品の取り出しや所定位置への設置、さらには搬送中の部品への組み付けやボルト締結。そうした複雑な作業を自動化するための基盤技術となるのが、ロボットの「目と脳」としての役割を果たすロボットビジョンです。
ニコンは、光利用技術と画像処理技術を核に、補正技術やハンドアイ方式を統合することで、環境変動や部品のばらつきといった「不確実性」に対応できるロボットビジョンシステムの開発を進めてきました。
人からロボットへの置き換えが進み、生産ラインにこれまで以上の柔軟性が求められるなかで、いかに自動化を実現するのか。それによって製造の現場にはどのような変化が生まれるのか。実際の導入事例や今後の展望を交えながら、その可能性を探ります。
人からロボットへの移行が浮き彫りにした、従来の「自動化」の課題
——そもそもなぜ今、ロボットビジョン技術が注目されているのでしょうか?
森田:人間の担ってきた作業が、ロボットに置き換えられつつあることが最大の理由です。そうした移行を加速させる要因となっているのが少子高齢化による人手不足です。特に地方の工場では「そもそも人が集まらない」という深刻な状況がおきつつあります。
従来、製造現場を自動化するためには、ロボットを前提として工程を最適化するのが当たり前でした。ところが、これまで人間が担ってきた工程の多くは、従来のロボットに最適化されたものではありません。この点が、人からロボットへの移行を阻む大きな壁になっています。

——人間が担ってきた作業の自動化は、従来の自動化と比べて、どのような難しさがあるのでしょうか?
森田:従来の自動化は「同じものが、決まった位置に配置されている」という前提のもとで設計されていました。ところが人間が担ってきた作業の場合、流れてくる部品のライン内での配置や、部品ごとの形状は一定とは限りません。さらに時間帯や天候によって工場内の光の加減が変わることもあり、ロボットのカメラだと対象をうまく認識できない、というケースも少なくありません。また、近年では多くの種類を少量生産するいわゆる「変種変量生産」を導入する製造現場も増えており、途中から部品や作業自体が変わってしまうラインもあります。
従来の自動化ではこうした「不確実性」に対応するために、治具で対象の姿勢を整えたり工程自体を改修して環境を均一化したりする対処が必要でした。
——とはいえ、工場の改修には少なくないコストがかかりますよね。
森田:その通りです。そこで注目されているのが、環境の変化をロボット側で吸収する仕組みです。ロボットが自らの置かれた環境を認識し、対象物の位置や形状のばらつきに応じて動作を補正できれば、既存の設備を大きく変えることなく少ないコストで工程の自動化を実現できます。そこでロボットの「目と脳」として、柔軟な対応を可能にするのがロボットビジョンです。
インテグレーションの難しさが、ロボットビジョン導入のハードルに
——ロボットビジョンの導入にあたっては、どのようなハードルがあるのでしょうか?
森田:ロボットビジョン単体の性能も大事ですが、それよりもそれをどのように生産工程に組み込むのか、といういわゆるシステムインテグレーションのハードルがまだまだ高いというのが実情です。ロボットとロボットビジョンを用いて対象物をどのように処置するのか。そのときどのような治具が必要で、どういった手順で進めていくのか。色々試しながらプログラムに落とし込んでようやくロボットビジョンは「現場で使える状態」になります。こうしたシステムインテグレーションの難しさが導入の大きな壁になっていることは否めません。
——工場の環境によっても、導入の難易度は変わってきそうですね。
森田:そうですね。環境として考慮しなければならないのが、周辺からの光の影響です。工場によっては太陽の位置や天候により、ライン上の明るさや影の出方が刻々と変化します。金属部品であれば表面の反射光も無視できません。こうした環境の変動は、対象物の位置や形状を正しく認識することを妨げる大きな要因となります。
——正しく認識できないと、やはり作業の精度そのものにも影響が出てくるのでしょうか?
森田:はい、大きく影響します。位置関係や形状を正確に認識できなければ、ロボットが対象物を掴む際にも意図せぬズレが生じてしまいます。そうなれば組み付けなどの位置精度も当然下がってしまう。補正のためにカメラを別途追加する方法もありますが、カメラが増えるほどにシステムは複雑化し、設置スペースもコストも大きくなってしまいます。これは大きなデメリットです。
こうした課題が積み重なることで、ロボットビジョンの導入を断念するケースも少なくありません。

不確実性に強いロボットビジョンを支える、ニコンの技術力
——そうした課題を踏まえ、ニコンのロボットビジョンの強みをあらためて教えてください。
森田:光利用技術、画像処理技術、補正技術、ハンドアイを統合することで、先ほど述べた「不確実性」への高い適応力を実現していることが、私たちの強みです。
なかでも光利用技術についてはニコンが光学機器の開発で培ってきた技術とノウハウをベースとしており、「光学素子」から自社で設計・製造できる強みを生かしています。市販の光学素子から条件が近いものを「選ぶ」のではなく、対象物や照明環境にあわせて「最適なもの」を自前で設計し製造できる。これによって、反射光などの影響を最小限に抑え、認識に最適な画像を安定して取得できます。
さらに画像処理技術を組み合わせることで、対象物をより正確に認識することが可能になりました。
——カメラをロボットハンドの先端に搭載する、いわゆる「ハンドアイ方式」を採用しているのには、どのような理由があるのでしょうか?
森田:利点として、カメラが常にロボットハンドとともに動き、対象物を「掴みながら見続けられる」ことが挙げられます。把持した対象物をリアルタイムで認識し、ズレがあるときはそれをふまえて置き位置の補正ができる。人が手に持ったものを目で確認しながら作業するのと近い感覚だと言えるでしょう。
また、ロボット自身が姿勢を変えて覗き込めるため、初期姿勢では死角になる位置にある対象物も柔軟に捉えることができます。結果として、追加のカメラや入れ物を振動させる仕組みなどを設置する必要がなくなり、システム全体をシンプルに保つことができる点も現場にとっては大きなメリットです。
——ほかにもニコンのロボットビジョンならではの強みはありますか?
森田:まずは、対象物の動きにリアルタイムで追従する「ビジョントラッキング機能」です。これによって従来は困難だった、コンベアなどの上を動き続ける対象物のピッキングや組み付けが可能になりました。
——そのほかに製造現場で活躍している機能はありますか。
森田:運用のなかで活躍している機能として挙げられるのが、クラウドオプションです。画像やエラーログを遠隔から確認できるため、トラブルの際にも迅速かつ正確な対応が可能になります。この機能を活用し、環境条件や生産条件が変化した場合に、設定の最適化やパラメータ調整を、当社が遠隔でサポートできる体制も整えてきました。導入して終わりではなく、変化し続ける現場にあわせて最適化を続けられることも、私たちの強みのひとつです。
「人でなければできない作業」の自動化を着々と進めている
——具体的な事例も教えてください。
森田:自動車部品の序列工程での事例を紹介します。複数種類の部品が並ぶ工程において、異なる部品A、B、C、…を順番にピックし、それぞれ所定位置へ組付ける作業の自動化を実現いたしました。
——これまで人の手によって担われてきた工程を、ロボットビジョンで代替した事例もあるのでしょうか?
森田:ライン上を流れてくる部品にボルトを挿入・締結する工程の自動化事例があります。これまで十数本のネジを順々に挿入・締結する作業を、人の手で延々と繰り返していました。組み付け先のロットの違いによる微妙な形状差や、コンベア搬送時に生じるわずかな位置のズレが組付け失敗に直結してしまうため、ロボットによる自動化は困難でした。
こうした課題への解決手段となり得るのがビジョントラッキング機能です。対象物そのものの動きにリアルタイムで追従できるからこそ、ロボット自身が細かな座標のズレを補正し、柔軟に対処できる。従来のコンベアトラッキングやメカ同期方式とは異なり、コンベアやエンコーダーなどの周辺機器との同期も不要です。設備側の大きな改修なしに導入できるため、費用や工事期間の大幅な削減にもつながります。

「人と機械が共創する社会」の基盤となる技術として、さらなる進化を
——そうした事例も踏まえながら、ロボットビジョンの今後の展望をどのように考えていますか?
森田:ハンドアイ方式の強みを活かし、自走式ロボットと組み合わせることで工程を横断する自動化ソリューションを提案していきたいと考えています。必要なときに必要な場所へ移動し、ロボットが人のように柔軟に作業を進める。ロボットビジョンは、そうした次世代の生産形態を可能にする基盤技術になり得ます。
また3Dトラッキングができるようになると、オーバーヘッドコンベアのように揺れを伴う搬送環境にもより安定して追従できるようになります。たとえば、搬送中の車体そのものに対する挿入作業や、成型・プレス後に姿勢を揃えずにコンベア搬送される部品の仕分けなど、これまで自動化が難しかった領域への対応も可能となるでしょう。
私たちニコンが目指す「人と機械が共創する社会の中心企業となる」という目標に向けて、ロボットにできることを着実に増やしていきたいと考えています。
——最後に、ロボットビジョンの導入を検討されているみなさまに、メッセージをお願いいたします。
森田:自動化を検討する際には、ひとつの工程だけではなく、その前後も含めた全体最適の視点が重要になります。実際にものの受け渡し方や配置の仕方を少し工夫するだけで、前後の工程の負荷やタクトタイムが改善するケースは少なくありません。だからこそ私たちは、単に「製品」を提供するだけではなく、顕在化していない課題もしっかりと掘り下げながら、生産工程の自動化や効率化に伴走してまいります。まずはぜひ一度、現場の状況をお聞かせいただければ幸いです。