お問い合わせ
株式会社ニコン ビジョンロボティクス本部
Japan
株式会社ニコン
株式会社ニコン デジタルマニュファクチャリング事業
Global Site
menu
ホーム
製品情報
close
ロボットビジョンシステム
ロボットビジョンシステム
アプリケーション
ばら積みピッキング
ビジョントラッキング
製品ラインナップ
ロボットビジョンシステム
クラウド
高速トラッキングカメラ
高速・高精度ローカライザー
可動式3D計測システム
活用事例
ダウンロード
ニュース&イベント
特集
お問い合わせ
CLOSE
PRODUCTS
ロボットビジョンシステム
高速センシングを2D/3Dカメラかつハンドビジョンに採用することで、ロボットの高速および柔軟な動作を実現します。
詳細を見る
高速トラッキングカメラ
撮影・検査ソリューション。周辺視・中心視を併せ持つカメラで、生産性向上やライン設計・運用時の工数削減を可能にします。
詳細を見る
高速・高精度ローカライザー
加工/計測における新FAソリューション。絶対位置座標による高精度加工・3D計測を実現し、ものづくりの自由度を高めます。
詳細を見る
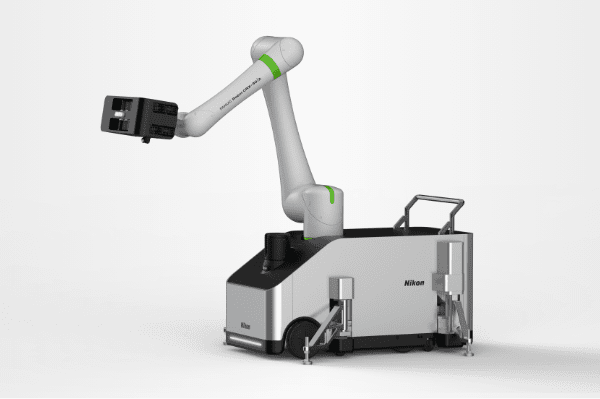
可動式3D計測システム
モビリティ・自動化・高速・高精度を実現し、オフラインからインラインまで柔軟に対応。現場の省人化・省機化・省スペース化に貢献します。
詳細を見る
DOWNLOAD
【カタログ】ロボットビジョンシステム
【カタログ】高速トラッキングカメラ
【カタログ】高速・高精度ローカライザー
詳細を見る
NEWS & EVENT
ニュース・イベント一覧を見る